|
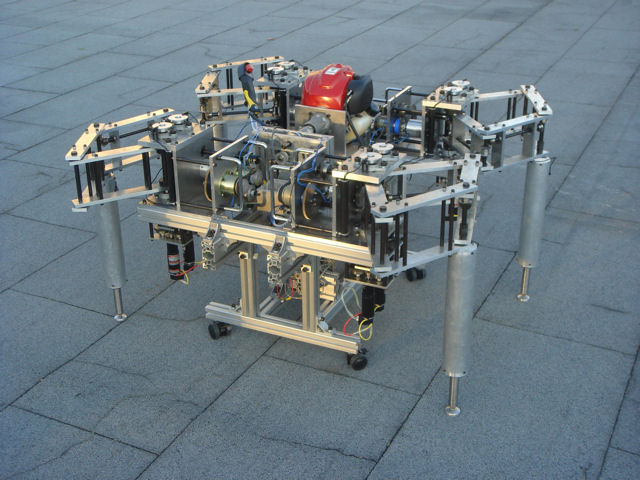
歩行という移動手段は,未開の荒地や階段などの段差の激しい地形などのさまざまな環境下において,これに適応しながら移動を行うことが可能であり,この長所は他の移動方式に比較して著しく優れています.したがって,歩行ロボットを工学的に実用化する意義は非常に大きく,本研究室では歩行ロボットを実用化するために解決しなければならない諸問題について取り組んでいます.その一つが機構設計の問題であり,エネルギーの損失の少ない歩行ロボットを実現するためには,様々な工夫を施す必要性があります.また,多くの足とそれらの関節をいかに効率よく動作させるかという,制御システムの構築方法も重要な問題であり,本研究室では従来の中央管理型のシステム構成から脱却し,分散処理型のシステムによって,柔軟性に優れた制御システムの実現をめざしています.
|