|
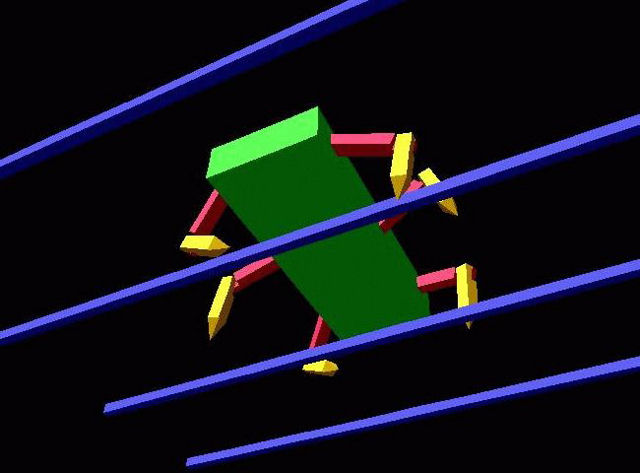
6脚歩行ロボットの長所の1つとして、故障などによって1つの脚が動作しなくなったとしても、残された5脚で静歩行(静的に安定性が保たれる歩行)を継続できる可能性がある事が挙げられます。しかし、これを実現するためには、そのための最適な歩容を見いだす必要があります。歩容とはどの脚をどのようにどんなタイミングで動かすかといった、脚の捌き方を意味します。本研究では1脚を欠損した6脚歩行ロボットを対象として、その最適歩容を見出すためのアルゴリズムを考察し、実際に安定性を高く保つことのできる歩容の獲得に成功しました。(写真:中損を欠損した時の歩行シミュレーション)
|