I
Ingk Lab. @ Tokai Univ.
Home
Info.
Activities
Staff
Contact
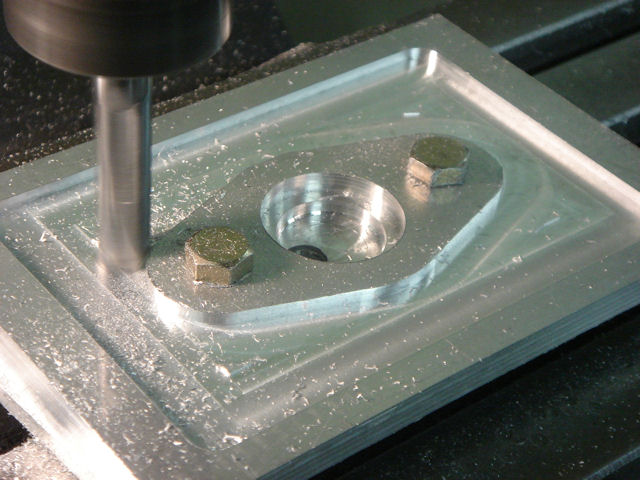
汎用フライス盤のNC化
各種ロボットの開発や本研究室で行っている機械工作の効率化を実現するため、フライス盤の一部の自動化を目的に行っている開発プロジェクトです。上の図はこの操作盤で、操作することで半自動的に平面加工を行い、工作作業の効率化を目指しています。現在、フライス盤の全自動化を目標に開発を行っています。
■ ハイブリッド駆動型多脚歩行ロボット
■ 省自由度型歩行ロボットの設計とその歩容計画
■ ブロードキャスト型分散制御システムによる多脚歩行ロボットの基本歩容の生成
■ 対故障性を考慮した多脚歩行ロボットの歩容解析
■ 実践的なロボット・メカトロニクス教育のための各種教材開発
■ 汎用フライス盤のNC化
■ 回転型LEDディスプレイ
■ USB接続型ニュース速報システム
■ 携帯型MP3プレーヤ
Copyright(c) 1995-2008 INGK Lab. Dept. of Applied Computer Engr., TOKAI Univ. All Rights Reserved.